四倾转旋翼无人飞行器倾转旋翼系统模块化设计方法研究 (上)
引言
倾转旋翼无人飞行器兼具旋翼飞行器和固定翼飞行器的特点,既拥有垂直起降的优势,又可以在一定程度上弥补旋翼类飞行器速度不足的缺点,已成为无人飞行器领域的研究热点。研究倾转旋翼飞行器最早的是美国贝尔公司,于1993年成功研制了TR918 鹰眼无人机,属于二倾转旋翼无人飞行器,最大飞行速度可达360 km/h;以色列于2010 年研制了一款三倾转旋翼无人机“黑豹”,由前侧2 个、尾部1 个电动倾转旋翼构成倒三角布局的三倾转旋翼无人飞行器;国内航空工业直升机设计研究所于2013 年提出了一款四倾转旋翼无人飞行器“蓝鲸”。纵观国内外倾转旋翼无人飞行器的研究,为了提高承载能力和性能,多旋翼化已成为倾转旋翼无人飞行器的发展趋势。
倾转旋翼无人飞行器的倾转旋翼系统在其控制结构上几乎一致,只是安装位置的不同使机械安装接口存在略微差异。倾转旋翼无人飞行器多旋翼化发展驱使倾转旋翼系统设计引入模块化设计理念,模块化设计可使在倾转旋翼系统机械设计、硬件设计、软件设计上减少设计工作重复性。模块化设计思想在国内外航空领域已有应用先例。罗利龙等以模块化可重构无人机机翼为研究对象,开展针对多模型的同步优化方法研究;李春鹏等针对多用途无人机开展了模块化气动布局设计,将主要气动部件分为公用、专用和通用三类模块,选择合适的模块组合方案实现多用途无人机综合气动性能最优;J.P.David 等[针对可重构无人机,系统地分析了模块化部件与无人机综合性能之间的影响关系,采用多级优化方法完成了模块化无人机的优化设计;J.C.Stephen 等提出了一种模块化的垂直起降无人机,可由多种倾转旋翼无人机通过磁耦合的方式进行组建,增加了机翼展弦比,提高了飞行性能。当前无人机模块化设计思想主要应用于气动布局、机械结构方面的优化设计研究,在倾转旋翼无人机上的应用还比较少,且模块化系统内部的控制结构以及模块化系统与外界的通信交互方面的研究也较少。
本文以四倾转旋翼无人飞行器为研究对象,采用模块化设计方法,对倾转旋翼系统从机械结构、控制结构和通信结构方面进行模块化设计;将倾转旋翼系统作为四倾转旋翼无人飞行器的一个节点系统进行节点控制器设计,应用CAN 总线通信机制使其成为整机分布式飞行控制系统的一个子系统;构建倾转旋翼系统模块化部件测试验证系统,开展倾转旋翼系统模块化部件设计测试和验证。
结构模块化设计方法
一、机械结构模块
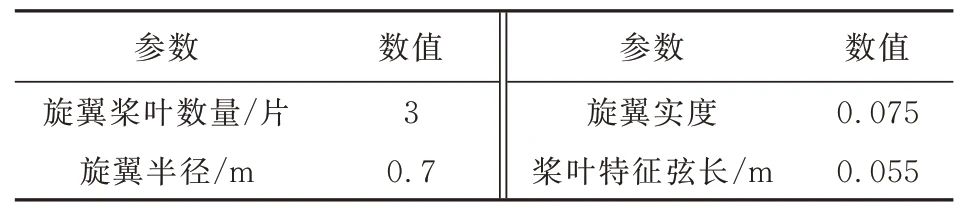
四倾转旋翼无人飞行器的基本构件是4 套倾转旋翼系统,作为动力部件承载着直升机模式、固定翼模式和过渡模式三种飞行模式的切换与功能实现。倾转旋翼系统三维设计结构图如图1 所示,机械部分由旋翼系统和倾转机构组成。旋翼系统为传统的三桨旋翼系统,由3 个变距舵机和1 个旋翼转速电机进行操控,经由自动倾斜器实现旋翼总距和纵、横向周期变距改变,可使旋翼气动力大小和方向发生变化,旋翼系统所用桨叶参数如表1所示。倾转机构由涡轮蜗杆、伺服电机及其驱动器构成,可改变倾转旋翼系统的整体气动力方向。四倾转旋翼无人飞行器由4 组相同部件构成,飞行器通道控制律经操控策略分配作用于倾转旋翼系统部件的操纵机构,使飞行器产生左右、前后及上下运动变化。

图1 倾转旋翼系统结构图
表1 旋翼参数
二、控制结构模块
1、分布式控制系统
四倾转旋翼无人飞行器除了配备4 组倾转旋翼系统外,还有垂尾和襟副翼等执行机构,整机执行机构共有25 个,用单一控制器设计整机飞行控制系统,连接执行机构的操控信号走线庞杂,会带来安全隐患。嵌入式飞控计算机主频在100~200 MHz,单一控制器运算量大,难以兼顾多传感器数据采集、融合与通信、控制律计算、控制信号输出等。
综合考虑各因素,四倾转旋翼飞行器整机飞行控制系统设计为分布式结构。4 组倾转旋翼系统各自拥有一套节点控制器,各节点操控策略依据飞行模式和所处的节点位置自行决策,控制旋翼系统相关执行机构。四倾转旋翼无人飞行器共设计有1 个主控制器和4 个节点控制器,主控制器负责飞行状态采集、地面站数据交互、通道控制律计算等任务。节点控制器与主控制器通过CAN总线相连,整机系统控制器位置结构布局如图2 所示。4 组倾转旋翼系统按顺时针顺序定义为节点1、节点2、节点3 和节点4,各配置1 个节点控制器,实现倾转旋翼系统模块化设计。
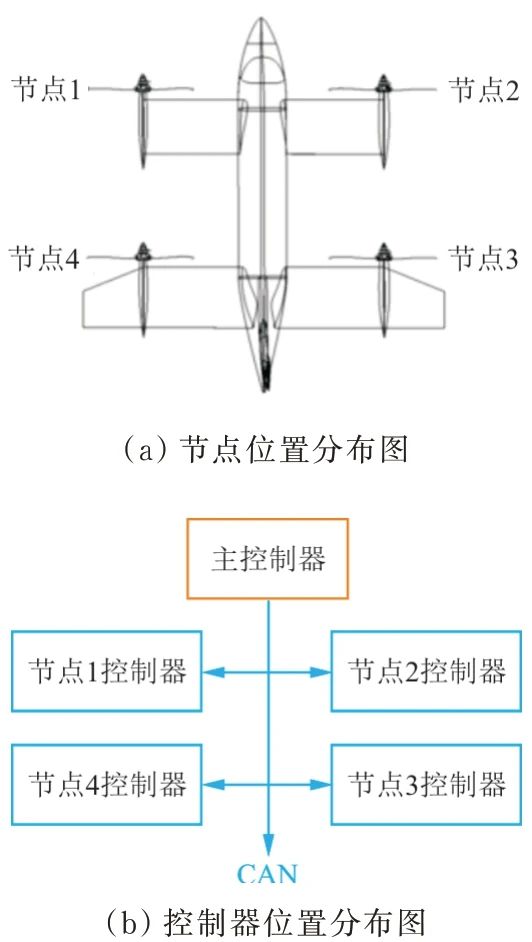
图2 节点控制器位置分布图
2、操控策略
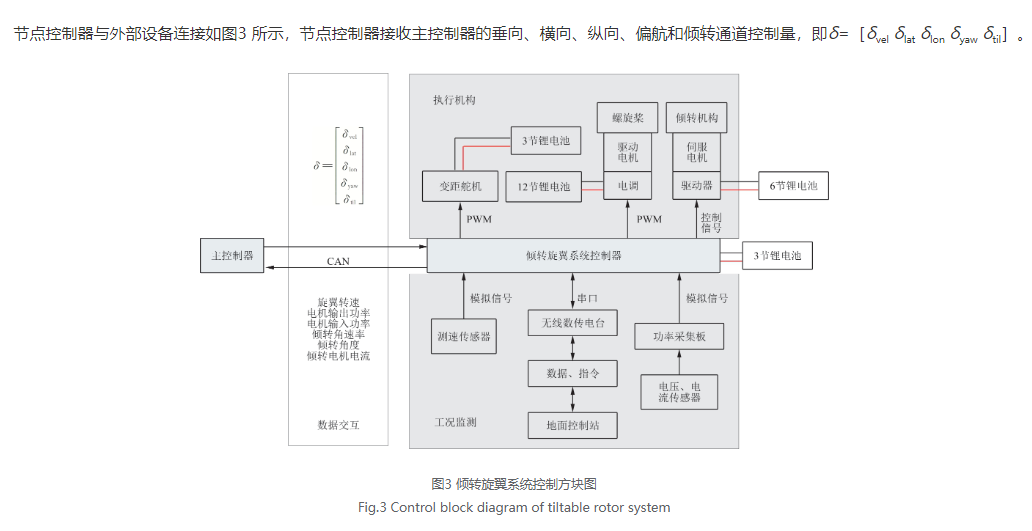
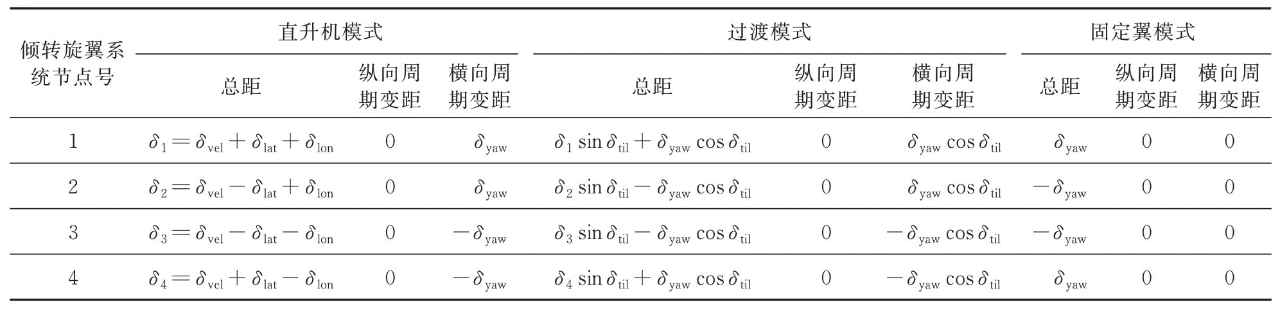
节点控制器根据其所在的节点位置按操控策略得到节点倾转旋翼系统各执行机构的操控量,即节点旋翼总距、纵向周期变距、横向周期变距、倾转旋翼系统倾转角度等操控变量,如表2 所示,4 组倾转旋翼系统旋翼操控量如表3 所示。过渡模式中的操纵权重系数依据倾转角三角函数计算分配得到。
节点控制器所采集到的相关状态量可通过CAN 总线发送给主控制器,供地面监控软件进行工况监测与数据记录。
表2 四倾转旋翼无人机操控策略
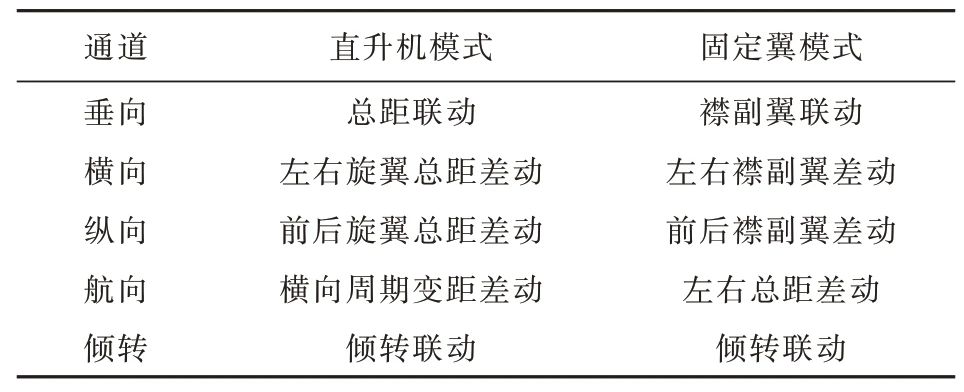
表3 旋翼操纵量与通道控制量关系
3、节点控制器
综合考虑倾转旋翼系统控制结构后,节点控制器应具备:
1) 计算处理和中断响应要快速;
2) 倾转旋翼系统多执行机构多通道控制输出;
3)与主控制器间数据传输实时通信。
据此功能要求,选用STM32F407VGT6 嵌入式处理器自研节点控制器。所选处理器主频为168 MHz,计算精度32 位,具有FPU 能力和丰富的外设资源,能够满足需求。自研的节点控制器实物图如图4 所示,含有PWM 输出模块、串口通信模块、输入输出引脚接口模块等,用于与外部设备相连。
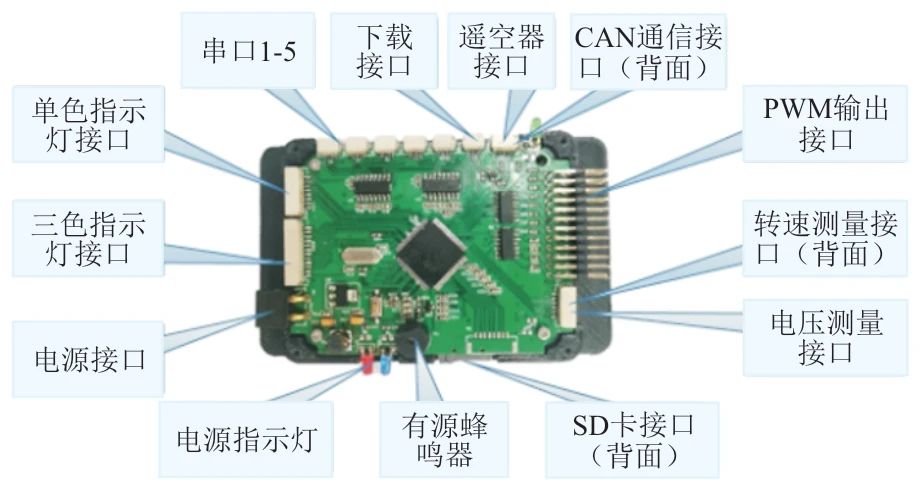
图4 节点控制器功能示意图
三、CAN 总线通信模块
CAN 总线是一种以差分信号进行数据通信的串行数据总线。由位填充、报文格式检查以及硬件CRC 校验等方式确保总线信息传输正确,具有抗干扰强、实时性好、灵活性高、成本低等特点。节点控制器以CAN 总线方式接入系统网络,整机系统控制器拓扑结构如图5 所示。
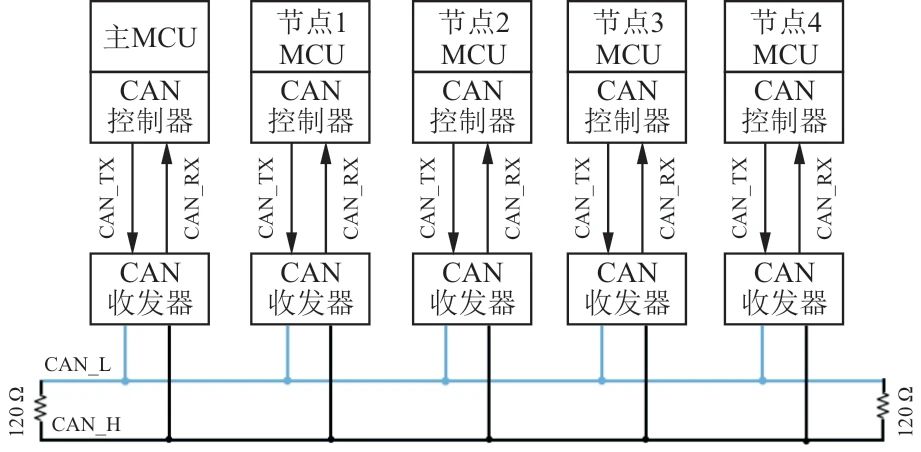
图5 基于CAN 总线节点控制器拓扑结构
1、CAN 通信电平转换
CAN 总线协议收发信号为差分电平,处理器内嵌的CAN 控制器收发信号为TTL 电平,需设计电平转换电路。基于TJA1050 芯片的电平转换电路如图6 所示,节点控制器可直接与转换电路挂接在一起。
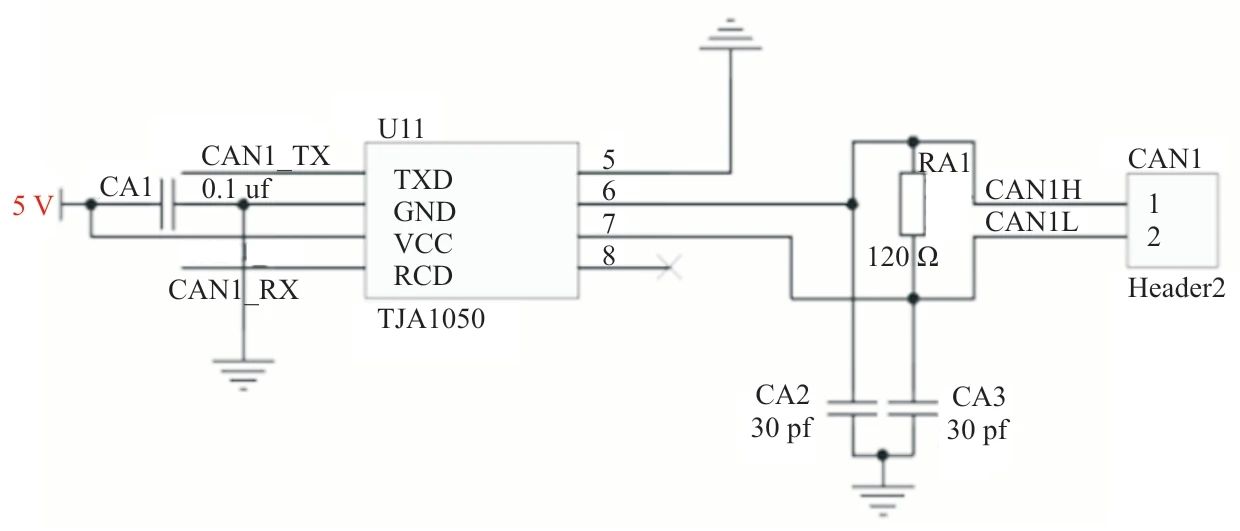
图6 CAN 总线电平转换电路
2、 CAN 通信机制
CAN 总线通信协议有标准帧和扩展帧两类。扩展帧标志符有29 位,即ID28~ID0,将此标志符位按数据基地址、收发节点号、读/写判断进行位分组,如表4 所示。
表4 CAN 扩展帧标识符位分组
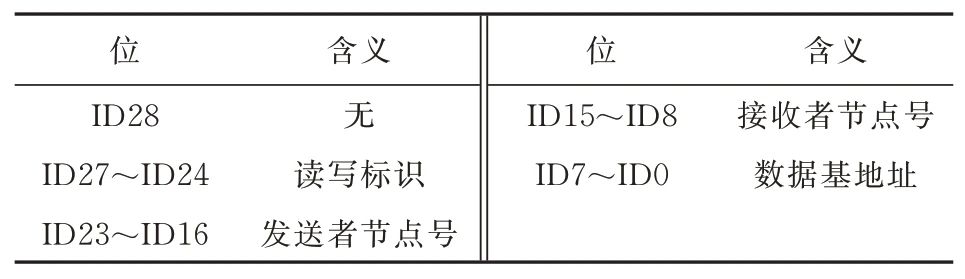
数据基地址由ID7~ID0 组成,主控制器和节点控制器数据区地址编址相同,数据基地址指通信数据的首地址,数据域长度由数据帧控制域DLC 定义,扩展帧ID 中不包含数据长度信息。数据域数据为主控制器或者节点控制器数据区的一组连续变量。
接收节点号由ID15~ID8 组成,发送者节点号由ID23~ID16 组成,每帧通信数据需要指定接收者节点号和发送者节点号。主控制器节点号为0,节点控制器节点号分别为1、2、3、4。
读写判断标识由ID27~ID24 组成,读写操作相对于节点控制器,标识0000 表示写入数据,按数据基地址更新节点控制器相应数据变量;标识0001 表示读取数据,即节点控制器相应状态量数据读取回送给主控制器。
节点控制器接收一帧CAN 数据帧的处理流程如图7 所示,数据由主控制器发送,为按飞行模式计算得到的通道控制律数据,由节点控制器接收并执行。节点控制器发送的CAN 帧数据为工况及状态信息,由主控制器接收。
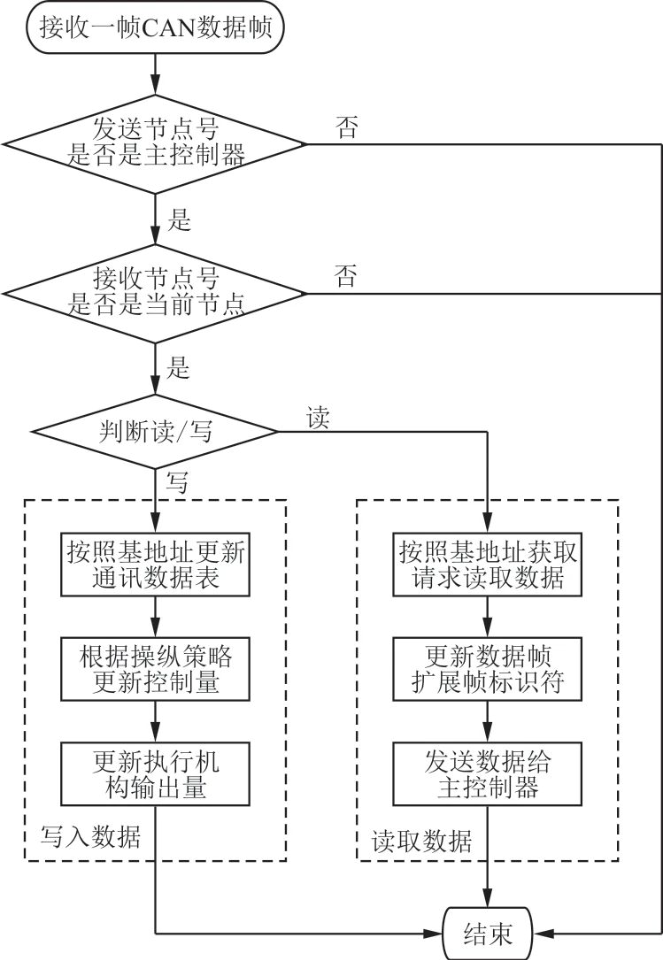
图7 CAN 数据帧接收处理流程图